Разные-разности
Статья подготовлена в соавторстве с Ворониным Игорем Вадимовичем, начальником отдела информационных технологий Института Проблем Лазерных технологий Российской Академии Наук, Шатура, ИПЛИТ РАН (публикация в материалах конференции ИТО-2013)
Сайт образовательного проекта УМКИ – http://umki.vinforika.ru/
В статье рассматриваются вопросы связанные с использованием в образовательном процессе роботоконструкторов УМКИ, на основе использования среды программирования КУМИР и организации дистанционной связи роботов в единую сенсорную сеть. Проект УМКИ основан на свободном программном обеспечении, использование программной среды КУМИР способствует формированию алгоритмического мышления – умению планировать последовательность действий для достижения цели.
В настоящее время, мало кого можно удивить радиоуправляемой машинкой. Но если необходимо управлять не одним устройством, а двумя, тремя, сотней?..
Как договориться с устройством, чтобы радиосигнал от одного пульта не заставлял сразу все машинки двигаться в одну сторону, например, вправо? Как добиться, чтобы затраты энергии на управление были бы минимально возможными, а сеть таких машинок просуществовала максимально долго? Как организовать взаимодействие между несколькими операторами устройств? Кто решает, кому и в какой момент времени подавать нужную команду, чтобы избежать конфликтов?
Очевидно, что в ситуации где присутствует много управляемых элементов, люди могут очень легко запутаться. Поэтому необходимо, чтобы команды управления по радиоканалу адресовались на конкретное устройство, точно в нужный момент времени. Даже если машинка находится вне зоны прямой видимости базовой станции, нужно уметь позиционировать, с достаточно высокой точностью местонахождение каждого устройства, с тем, чтобы, например, зная в какой точке обнаружен устройством очаг задымления, вторая платформа — с брандспойтом, могла подъехать точно в это место и потушить пожар.
Вот так, чтобы легко и просто — в процессе игры, научиться управлять подобными устройствами, был разработан образовательный конструктор: УМКИ – Управляемый по радио каналу Машинный Конструктор Инновационный. Достоинство конструктора в том, что он комплектуется роботизированными платформами, которые связываются между собой в единую сенсорную сеть, на основе протокола ZigBee. В процессе работы с этим конструктором, ученики получают базовые знания по управлению сначала одним устройством, потом группой устройств объединенных в распределенную беспроводную сенсорную сеть. Каждая роботизированная платформа оснащается либо набором сенсоров-датчиков для различных физических величин, либо исполнительными механизмами. Машинку можно заставить двигаться по программе, ориентироваться на местности и выполнять разнообразные задания. Курс обучения составлен таким образом, чтобы на каждом этапе детям было максимально интересно получать знания. Выполняя шаг за шагом задания к занятиям — учащиеся проходят разнообразные миссии: осваивают далекие планеты, занимаются охраной окружающей среды, тушат пожары и многое-многое другое. Занимаясь с конструктором УМКИ, в игровой форме дети получают основы серьезных инженерных знаний, воспитывается их информационная, техническая и исследовательская культура, происходит формирование навыков коллективного труда.
Текущая версия УМКИ, базируется на элементах и различных инженерных схемах «Электронного конструктора «Знаток» – радиоуправляемый вездеход «Лидер»». Она укомплектована методическими материалами для преподавателей, включающими программу курса дополнительного образования детей, тематическое и почасовое планирование, набор дидактических и методических материалов подробное руководство пользователя. Аудитория курса – учителя начальных классов, педагоги дополнительного образования, родители, руководители кружков технического творчества. В материалах курса «УМКИ» раздел ориентированный на детей наполнен научно-популярной информацией, задания представлены в игровой форме — как процесс изучения окружающего нас мира. Педагоги в методических разработках найдут материалы, предназначенных для использования в процессе работы интерактивной доски. Все миссии курса представлены в разнообразных вариантах, допускающих изменения и связаны между собой логической составляющей и при необходимости каждый из педагогов сможет, без особых временных затрат сформировать собственную рабочую программу.
После первого обучающего этапа на котором происходит начальное знакомство с управлением умной машинки — SmartCar -УМКИ, на котором дети учатся создавать простые управляющее программы и знакомятся с различными сенсорными устройствами, происходит непосредственное изучение возможностей конструктора, реализованное в форме миссий.
Например, «Миссия на Марс».
На этом этапе ученикам необходимо реализовать миссию построив модель имитирующую освоение Красной планеты. Цель миссии – создать колонию на Марсе. При сборке конструктора ученик получает базовые навыки связанные со сборкой схем из технической документации, при программировании робота развиваются умения вносить необходимые дополнения и изменения в реальный план и способ действия. Попутно учащимися решаются другие задачи: нужно непосредственно создать антураж колонии: т.е. слепить, склеить, построить, раскрасить ангары, маршруты, препятствия и т. д., причем, все это должно соответствовать марсианскому пейзажу – следовательно возникает необходимость получения знаний по астрономии, архитектуре, технике. Таким образом дети поставлены перед необходимостью проводить моделирование, выполнять знаково-символические действия, проводя преобразование объекта из чувственной формы в модель, с выделением существенных характеристик объекта, осуществляя деятельность соответствующую требованиям современных Федеральных государственных образовательных стандартов нового поколения.
Поскольку наборы конструкторов УМКИ, предполагается использовать в дополнительном образовании детей, в кружках технического творчества, то вместе с изучением робототехники, предполагается коллективная работа и совместное решение задач, реализуемое в форме стратегии. Таким образом, выполняя каждый этап миссии, дети собирают схему из конструктора, разбираются в принципе его работы, отвечают на вопросы по естествознанию (астрономии, физике, химии, биологии), тем самым увеличивая виртуальное жизненное пространство сообщества на Марсе, производят планирование учебного сотрудничества с учителем и сверстниками – определение цели, функций участников, способов взаимодействия.
К достоинству курса «УМКИ», можно отнести то, что это не отупляющая «стрелялка» или «бродилка», а интеллектуально развивающее пособие, которое позволяет в игровой форме, каждому ребенку, занимающемуся с конструктором УМКИ, под руководством преподавателя, или самостоятельно получить в увлекательной форме базовые знания и умения их использовать по основным естественным дисциплинам: физике, математике, механике, электротехнике. Кроме того, курс разработан таким образом, что преподаватель может общаться с учениками не только в очной форме, но и давать задания, и проверять результаты выполнения в форме дистанционного обучения.
В базовой комплектации, роботизированный комплекс-конструктор УМКИ состоит из:
1. 4-х колесного вездехода, или иначе говоря — передвижной платформы с модулем zigbee, который позволяет связываться множеству платформ по стандарту IEEE 802.15.4 в единую, распределенную самоорганизующуюся сенсорную сеть.
2. Радио-шлюза — который по USB соединяется с персональным компьютером и служит для отправки команд по радиоканалу и приема ответов о выполненных процедурах.
3. Программного обеспечения на персональном компьютере, для управления передвижной роботизированной платформой — одной конкретной — выбираемой по МАК-адресу, или множеством сообщества.
Вместе с тем, конструктор УМКИ может быть доукомплектован набором различных датчиков, унифицированых таким образом, что они легко и просто подключаются к базовой платформе и становятся доступными для выполнения дополнительных миссий.
Программное обеспечение для управления вездеходом состоит из следующих модулей:
1. Серверной части, написанного на C++, и скомпилированной под GCC, которая загружается при запуске системы в оперативную память и находится там в постоянно активном состоянии – для формирования команд управления передвижной платформой, и приема ответов о выполненных командах. 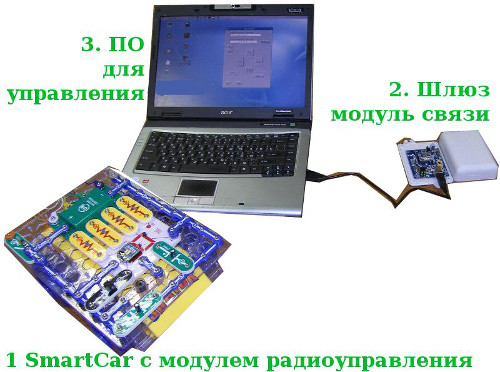
Состав конструктора
2. Модуля внешнего интерфейса, написанного на QT и предназначенного для управления мышкой или с клавиатуры для управления передвижением поворотной платформы. 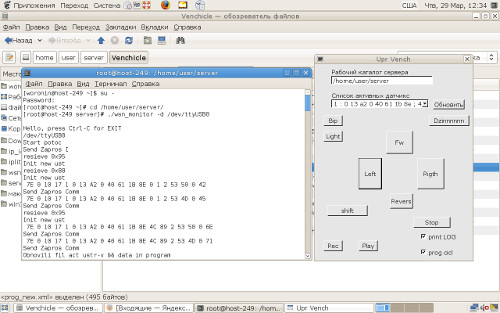
Внешний вид монитора и программы управления
3. Свободно распространяемого программного пакета КУМИР – для программирования и задания пути движения передвижной платформы. (Следует обратить внимание на то, что программный пакет КУМИР - рекомендован для использования в школах и при подготовке к сдаче ЕГЭ)
Методика работы
Занятия лаборатории робототехники УМКИ проводятся в рамках кружка дополнительного образования (1 час в неделю в течении 3 лет), а также в рамках работы отряда УМКИ лагеря детей дневного пребывания на базе школы МБОУ СОШ №7 (Июнь-июль ежегодно)
Актуальность:
Существует множество важных проблем, на которые никто не хочет обращать внимания, до тех пор, пока ситуация не становится катастрофической. Одной из таких проблем в России становится её недостаточная обеспеченность инженерными кадрами.
Работу по мотивации детей к занятиям серьезной наукой нужно начинать как можно раньше в начальной школе! Откуда такой вывод? При анкетировании детей, на предмет, желают ли они заниматься в кружках технической направленности определилась следующая картина: в 9 и выше классах практически никакого интереса, в 6-8 классах интерес проявился в основном у тех детей, которые дома занимаются лего-конструкторами, радиоэлектроникой, программированием. А вот у 4 класса интерес оказался просто огромен. Т.е. если дети до 11-12 лет не касались, например, технического творчества, то потом у них интерес к этому занятию возбудить достаточно сложно. Поэтому работу по пропедевтике физики, робототехники, началам программирования необходимо проводить в начальной школе и пятых классах. В результате в среднюю школу придут дети, у которых развиты конструкторские навыки, алгоритмическое мышление, интерес к экспериментированию.
Таким образом необходимо активно начинать пробуждение интереса к точным наукам и массовую популяризацию профессии инженера, причем предпринимать такие шаги, необходимо для детей с достаточно раннего возраста. Необходимо вернуть массовый интерес к научно-техническому творчеству.
Новизна:
Организация лаборатории робототехники это:
- внедрение современных научно-практических технологий в учебный процесс;
- содействие развитию детского научно-технического творчества;
- популяризации профессии инженера и достижений в области робототехники.
Для создания Лаборатории УМКИ необходимо:
1. Приобрести наборы образовательных конструкторов роботов УМКИ (Управляемый Машинный Конструктор Инновационный);
2. Укомплектовать роботов датчиками, играющими для роботов роль органов чувств;
3. Приобрести, установить и настроить программное обеспечение для проектирования и программирования роботов;
4. Приобрести научные конструкторы позволяющие показать связь между школьной программой и окружающей нас современной жизнью: дающие возможность формировать модели миссий с помощью элементов, которые присутствуют в окружающей нас технике – компьютерах, автомобилях, фотокамерах, музыкальной аппаратуре и т.д.
5. Разработать различный дидактический материал.
Программа работы лаборатории «УМКИ» рассчитана на учащихся начальной школы и среднего звена (5-6 класс) На доступном уровне дети знакомятся с основами цифровой техники, учат роботов взаимодействовать с окружающим миром. Физические принципы работы электронных схем объясняются на практических примерах реализованных в действующих моделях конструктора.
Робототехника в школе представляет учащимся технологии 21 века, способствует развитию их коммуникативных способностей, развивает навыки взаимодействия, самостоятельности при принятии решений, раскрывает их творческий потенциал.
Внедрение в образовательный процесс лаборатории робототехники позволяет применять
- игровые технологии в обучении;
- новые формы работы с одаренными детьми;
- эффективные формы работы с проблемными детьми
- возможности инновационного обучения;
- современные ИКТ технологии в школе;
- творческий потенциал учащихся;
- проводить популяризацию профессий научно-технического направления.
В дальнейших планах развития проекта УМКИ — переход от обучения программированию перемещениями в плоскости — 2D, посредством использования алгоритмов, заложенных при разработке данного УМКИ, на управление объектами, перемещающимися в 3D пространстве, например беспилотными летательными аппаратами.
------Авторские права на материалы, опубликованные на сайте vinforika.ru полностью принадлежат автору. При использовании/копировании ссылка на источник http://vinforika.ru обязательна.